1
¿Qué es la robótica? Historia y aplicaciones
Presentación del curso. Conceptos de robótica, automatización y computación física. Hardware y software libre. Herramientas del año: Arduino, DuinoBot, Tinkercad, Minibloq.
Profundización en robótica, electrónica y programación física. Los alumnos trabajan con Arduino, TinkerCAD y DuinoBot para diseñar circuitos, programar microcontroladores y construir proyectos de mayor complejidad.
Programa del año - 15 semanas
4 semanas disponibles · 11 por desbloquear
Presentación del curso. Conceptos de robótica, automatización y computación física. Hardware y software libre. Herramientas del año: Arduino, DuinoBot, Tinkercad, Minibloq.
Conceptos de voltaje DC/AC, corriente (A), resistencia (Ohm), Ley de Ohm. Identificación de componentes: LED, resistencia, pulsador, buzzer, motor DC, protoboard. Diferencia entre señal digital y analógica.
Concepto de algoritmo. Tipos de lenguajes (máquina, ensamblador, alto nivel). Estructura mínima de un sketch Arduino. Variables, operadores matemáticos/booleanos y estructuras de control (if, for, while).
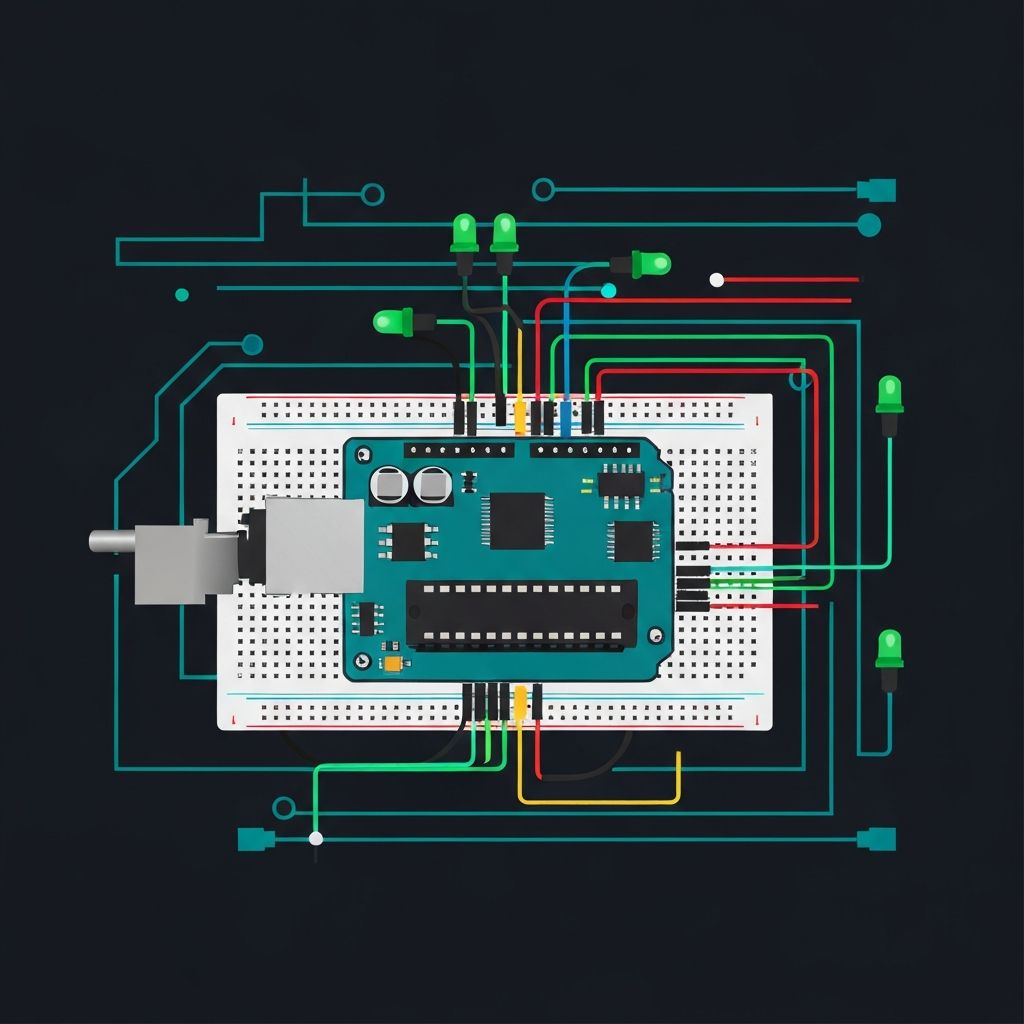
Uso de múltiples pines de salida digital. Función digitalWrite() y delay(). Conexión de LEDs con resistencias 220 Ohm. Simulación del ciclo completo: verde (3s) - amarillo (1s) - rojo (3s). Se realiza TP-3.
Incorporación de botón pulsador (pin 2) con resistencia pull-down 10kOhm. Al pulsar: semáforo pasa a rojo y se activa LED peatonal. Conceptos: digitalRead(), resistencia pull-down, condicional if/else. Se realiza TP-4.
Funcionamiento del puente H. Integrado L293D: pinout y conexiones. Control de dirección de 2 motores DC desde Arduino. Código para avanzar, retroceder y detener. Desafío: agregar botones de control. Se realiza TP-5.
Repaso general de los contenidos del primer cuatrimestre. Evaluación escrita sobre electrónica básica y programación. Evaluación práctica: diseño y simulación de circuito en Tinkercad. Se entrega TP-6.
Identificación de las partes de la placa Arduino UNO (microcontrolador, pines digitales, analógicos, alimentación). Instalación del IDE Arduino. Carga del primer programa (Blink) al hardware físico. Comunicación serial (Serial.println).
Presentación del DuinoBot: características y diferencias con Arduino UNO. Entorno Minibloq: interfaz, bloques de movimiento, espera y salidas. Primer programa en bloques: encender/apagar LEDs del DuinoBot. Conexión y carga al hardware.
Montaje de motores y ruedas en el chasis. Instalación de rueda loca para estabilidad. Conexión de motores al módulo de control del DuinoBot. Verificación de alimentación (GND/5V). Prueba individual de motores desde Minibloq.
Conexión de sensores infrarrojos a pines digitales del DuinoBot. Lógica de navegación en Minibloq: avanzar si no hay obstáculo, girar o retroceder según el sensor que detecta. Carga del programa y prueba en banco.
Armado de laberinto simple con materiales disponibles. Ejecución del programa en el robot real. Observación del comportamiento ante obstáculos. Ajuste de velocidad y sensibilidad de sensores.
Discusión grupal sobre dificultades en el armado y cómo se resolvieron. Análisis de los cambios realizados en el programa. Reflexión sobre sensores y control de motores. Redacción de propuestas de mejora.
Cada grupo expone su robot al resto de la clase. Explicación del funcionamiento, sensores y lógica de programación. Entrega de documentación completa: foto/video, esquema de conexión, captura del programa y descripción.